|
|
АНАЛИЗ
ДВИГАТЕЛЬНОЙ ДЕЯТЕЛЬНОСТИ
ТЕННИСИСТА В ВИРТУАЛЬНОЙ
СРЕДЕ О.Ю. Портнова,
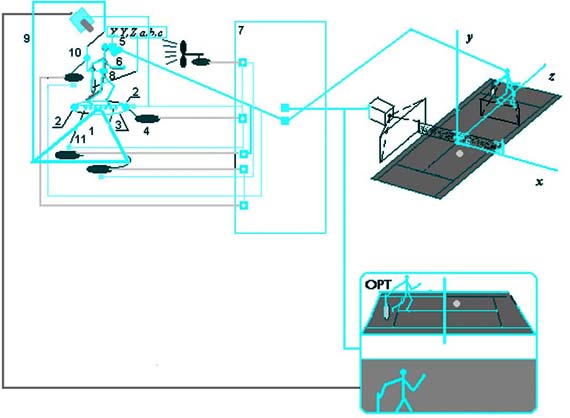
А.Г. Рязанов Моделирование разных сторон тренировочной и соревновательной деятельности в теннисе - чрезвычайно трудный и наукоемкий процесс ввиду сложности действий спортсмена в ходе спортивной борьбы. Особенности же соревновательной деятельности на площадках с различным покрытием требуют выявления закономерностей оптимальных биомеханических характеристик двигательных действий теннисиста. Для анализа конкретных (например, тестовых) действий теннисиста необходима многоканальная текущая информация (имеются в виду физиологические и биомеханические характеристики), которая в реальном масштабе времени должна быть должным образом обработана и использована для коррекции двигательных действий. Хотя некоторые компоненты соревновательной деятельности теннисиста нами регистрировались [4], проведение вышеотмеченного анализа в реальных условиях тренировки и соревнований весьма затруднительно. Ранее [1] отмечалось, что такие условия соревновательной и тренировочной деятельности с ее многоканальным анализом могут быть обеспечены на спортивном тренажерном комплексе (СТК). Изготавливаться СТК может по патенту РФ [2], в основе которого лежит двумерный третбан (для его изготовления необходим сложный технологический анализ по ноу-хау автора). Однако для анализа тестовых действий теннисиста (например, быстрое выбегание к сетке после укороченного удара соперника) можно использовать другое изобретение [3], которое представляет собой одномерный третбан (бегущую дорожку). Роботизированная тренажерная система для теннисиста (РТСТ) включает (рис. 1): третбан (установленные на раме 1 барабаны 2, охваченные транспортерной лентой 3, управляемый электропривод барабанов 4); средство для отображения виртуального теннисного корта, которое выполнено в виде шлема виртуальной реальности 5 с трекером (датчик положения с шестью степенями свободы) с установленными на нем видеокамерами 6 (причем как шлем, так и видеокамеры посредством соответствующих блоков сопряжения подключены к блоку управления 7), средство для фиксации положения спортсмена над лентой и создания тяговых усилий (выполненное в виде пояса 8, который крепится на теннисисте и посредством тяг 9 связан с рамой 1). На ракетке (как и на шлеме виртуальной реальности) установлен датчик положения с шестью степенями свободы (6DOF). РТСТ выполнена с возможностью установки результирующей приведенной массы вращающихся частей третбана, приблизительно равной массе теннисиста, а видеокамеры на шлеме виртуальной реальности установлены по линии взгляда, при этом блок управления выполнен с возможностью наложения проекции от видеокамер на виртуальный теннисный корт. Наушники шлема, выполненные из двух блоков по четыре динамика, подключены к блоку управления с возможностью позиционирования звуков игроков и мяча в виртуальном теннисном корте (не показано). Выходы блока управления 7 связаны с соответствующими входами перечисленных средств и входами электропривода 4. Перед тренировкой теннисист надевает на голову шлем виртуальной реальности, пристегивается к поясу, берет ракетку с датчиком и после включения блока управления ожидает полета виртуального теннисного мяча (например, укороченного). При ускоренном движении теннисиста к укороченному мячу управляемый электропривод позволяет исключить насильственное задание скорости третбана, поскольку спортсмен сам перемещает ленту третбана через реакцию опоры и пояса (приведенная масса вращающихся частей третбана задается равной массе самого теннисиста). Для анализа кинематических и динамических характеристик движений теннисиста на площадках с различным покрытием на транспортерную ленту наклеивается покрытие, соответствующее программе исследования. В созданных лабораторных условиях регистрация вертикальной и горизонтальной (в направлении перемещения теннисиста) составляющих усилий при взаимодействии спортсмена с опорой на различных тестируемых покрытиях осуществляется с помощью тензокольца 10 и тензоплатформы 11. Конструктивной особенностью тензоплатформы, служащей опорной площадкой на РТСТ, является наличие вращающихся роликов, по которым стопа теннисиста перемещается вместе с тестируемым покрытием. Равные усилия, прилагаемые к разным точкам платформы, по которым перемещается опорная нога, вызывают одну и ту же величину разбаланса измерительного моста [5]. Данная особенность позволяет регистрировать динамограммы усилий всех шагов перемещения теннисиста (например, при ускоренном движении к укороченному мячу), а также дифференцировать время опоры и полета испытуемого при каждом шаге.
Следует отметить, что пиковое значение в начальный момент опорного усилия, которое, по нашему мнению, является следствием удара при постановке ноги (часть движущейся массы ноги теннисиста при встрече с исследуемым покрытием останавливается за очень малый промежуток времени), может определяться данным методом с большой ошибкой. Период удара вполне может попадать в резонансную частоту тензоплатформы, что, собственно, покажет более высокую величину пикового значения усилия в момент постановки ноги. По этим причинам при обработке материала величину усилия в момент постановки ноги учитывать не следует. Таким образом, для анализа двигательных действий теннисиста на площадках с различным покрытием в лабораторных условиях используется РТСТ с элементами , приведенными в таблице. Литература 1. Захаров А.А., Портнова О.Ю., Рязанов А.Г. и др. Новые информационные технологии и современный тренировочный процесс // Матер. Юбилейной науч.-практ. конф., посвященной 70-летию ВНИИФКа. М., 2003, с. 128-131. 2. Патент РФ на изобретение № 2149667. Устройство для тренировки и соревнований, преимущественно в спортивных локомоциях и играх / А.Г. Рязанов - Опубл. 27.05.2000. Бюл. №15. 3. Патент РФ на изобретение № 2111037. Устройство для тренировки в спортивных локомоциях / А.Г. Рязанов. - Опубл. 20.05.1998. Бюл. № 14. 4. Портнова О.Ю. Особенности регистрации соревновательной деятельности в теннисе// Матер. совместной науч.-практ. конф. РГАФК, МГАФК и ВНИИФКа. М., 2001, с. 92-96. 5. Рязанов А.Г. Развитие быстроты локомоторных движений спортсменов с использованием тренажерных и электростимуляционных средств: Канд. дис. М., ВНИИФК, 1984, с. 26-30.
При любом использовании данного материала ссылка на журнал обязательна! |