|
Abstract ANALYTICAL UNIFICATION OF DYNAMIC STRUCTURE OF INTERACTION WITH SUPPORT AT PERFORMANCE OF BLOW CHARACTER PUSHING AWAY E.A. Stebletsov, Ph. D., professor, honored coach of Russia Russian state academy of physical culture, Moscow Key words: blow character pushing away, support, interaction, tensodinamogramm, dynamic structure, work of the motor-supporting apparatus, alphabetic unification. The kind of pushing away described by the interaction with a support at the presence of the preliminary stock of the kinetic energy is considered in the article. Bounces upwards after jump down from height 0,25; 0,5 and 1 m are chosen for the analysis. The typical characteristics of the dynamic structure of interaction with a support connected with peculiarities of the work of the motor-supporting apparatus depended on the size of preliminary kinetic energy are revealed. The protective mechanism of work of the motor-supporting apparatus is shown at blow variants of interaction with a support. The identity of the kind of the occurrence of the dynamic structure in each kind of pushing away has allowed to prove and enter their alphabetic unification. An alphabetic complex "OSG" characterizes the dynamic structure of interaction with a support of blow character at the performance of the most elastic kinds of pushing away. An alphabetic complex "OPRSG" is for the quasi-elastic pushing away. And the least elastic kinds of blow pushing away by an alphabetic complex "OPRSTQG". The unified designations of dynamic structure of interaction with a support of a blow character for testing and the diagnostics of athletes are offered for the use.
|
АНАЛИТИЧЕСКАЯ УНИФИКАЦИЯ ДИНАМИЧЕСКОЙ СТРУКТУРЫ ВЗАИМОДЕЙСТВИЯ С ОПОРОЙ ПРИ ВЫПОЛНЕНИИ ОТТАЛКИВАНИЙ УДАРНОГО ХАРАКТЕРА Кандидат педагогических наук,
профессор, заслуженный тренер России Е.А.
Стеблецов Ключевые слова: отталкивания ударного характера, опора, взаимодействие, тензодинамограмма, динамическая структура, работа опорно-двигательного аппарата (ОДА), буквенная унификация. Введение . Известно, что отталкивание, характеризующееся взаимодействием с опорой, при наличии предварительного запаса кинетической энергии (поступательного движения тела) носит характер удара [3, 4, 9, 12, 19]. Исследованиями доказано, что во время ударного взаимодействия с опорой часть механической энергии накапливается в виде потенциальной энергии упругой деформации в структурных компонентах двигательного аппарата [8, 11, 14, 15, 16, 19, 20, 26, 27]. Рекуперация энергии представляет собой сложный процесс, рассматриваемый в работе в формализованном варианте. Величина кинетической энергии, которой обладает спортсмен до начала взаимодействия с опорой, а также целевая установка и внешняя организация самого отталкивания вносят существенные коррективы в механизм работы двигательного аппарата и, соответственно, в динамическую структуру движения. Организация исследования . В качестве модели исследовательского объекта и с целью идентичности условий снятия параметров рассматривались отталкивания двумя ногами вверх после спрыгивания с высоты 0,25, 0,5 и 1 м. Подобный вариант взаимодействия с опорой характеризуется как прямой, центральный удар и вызывает наибольшую функциональную нагрузку на ОДА испытуемого. В обследовании приняли участие 652 спортсмена высокой квалификации (см. таблицу). Перед испытуемыми в исследовании ставилась целевая установка на выполнение отталкивания как можно быстрее и выше. Для исключения влияния маховых движений на динамическую структуру взаимодействия с опорой все виды отскоков выполнялись без движения рук. На каждый вариант отталкивания давалось по три попытки. Исследование осуществлялось через анализ тензодинамограмм вертикальной составляющей реакции опоры, электромиограмм, снятых с основных рабочих групп мышц нижних конечностей, и синхронизированной видеозаписи процесса отталкивания. Электромиография проводилась с использованием радиотелеметрической системы "Спорт-4". С ее помощью выявлялись основные группы мышц, участвующих в различных видах отталкивания, а также характеристики координации их работы. Для исследования биодинамических параметров отталкиваний с различными двигательными задачами применялся метод тензодинамометрии. Графические и цифровые показатели снимались при помощи динамометрического комплекса "Модуль А", состоящего из тензодинамометрической платформы ПД-3А с собственной частотой колебаний 400 Гц и блока вторичного преобразования БВП-2. Динамометрический комплекс позволяет производить измерения силовых параметров взаимодействия в 3-плоскостной координационной системе с погрешностью менее 2%. После усиления по мощности электрические сигналы подавались на комплекс регистрирующей аппаратуры, состоящей из нескольких блоков. Состав испытуемых, участвовавших в исследовании
В состав блока срочной информации входили: - 8-канальный электронно-лучевой индикатор ИМ-789 - для визуального наблюдения за динамической структурой отталкивания; - цифровой импульсный вольтметр В-14, позволяющий фиксировать максимальную силу взаимодействия с опорой с точностью до 0,1 кг, - для определения силовых параметров отталкивания; - два электронных миллисекундомера СТЦ-1 для регистрирации времени взаимодействия с опорой и времени полета после отталкивания, производящих измерение с точностью до 0,001 с, - для определения временных параметров. Сравнительный анализ динамической структуры различных видов отталкивания проводился с использованием двухлучевого осциллографа С1-42, позволяющего фиксировать индикацию на экране до 24 ч. С целью графической регистрации динамических параметров отталкивания на бумаге применялся исследовательский комплекс К-121, в состав которого входят шлейфовый осциллограф Н-117 и 8 избирателей пределов Р009, Р010 с калибратором каналов П029. Исследуемая информация записывалась на фотобумагу, протягиваемую со скоростью 100 мм/с. Для визуального наблюдения за пространственно -временными характеристиками двигательного действия использовалась синхронизированная с тензодинамографическим комплексом видеозапись отталкивания, позволяющая регистрировать и впоследствии замедленно воспроизводить изображение спортсмена, выполняющего отталкивание. Съемка производилась на фоне специального экрана, разграфленного на квадраты (10 х10), который одновременно служил и масштабной сеткой. При обработке данных рассматривалась лучшая попытка, определяемая по высоте отскока. После выполнения каждого отталкивания испытуемые знакомились с основными характеристиками взаимодействия с опорой: временем выполнения отскока, максимальной силой взаимодействия с опорой, высотой отскока и т.д.
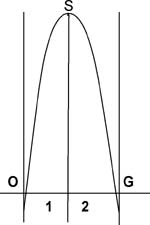
Рис. 1. Типичная тензодинамограмма взаимодей ствия с опорой при выполнении отталкивания вверх после спрыгивания с высоты 0,25 м:1 - статоуступаю щий режим работы ОДА; 2 - статопреодолевающий режим работы ОДА Результаты исследования. Рассматривая наиболее упругий процесс взаимодействия с опорой при выполнении отталкивания вверх после спрыгивания с высоты 0,25 м, в структуре работы ОДА можно выделить две фазы (рис. 1). Фаза статоуступающего режима работы двигательного аппарата характеризуется вынужденным амортизационным растяжением структурных компонентов ОДА, вследствие чего происходит сближение общего центра масс тела (ОЦМТ) с опорой. В этот момент осуществляется переход энергии движущегося тела в потенциальную энергию упругой деформации (погашение ударного импульса). В конце 1-й фазы кинетическая энергия уменьшается до нуля (полная остановка после амортизационного снижения ОЦМТ), а потенциальная энергия упругой деформации структурных компонентов стопы и голеностопного сустава характеризуется максимальным значением. В фазе статопреодолевающего режима работы происходит обратный процесс перехода накопленной потенциальной энергии в кинетическую энергию движения ОЦМТ вверх [14, 22]. В этой фазе ОЦМТ удаляется от опоры со скоростью, зависящей от организации двигательного действия, силовых и временных параметров взаимодействия. Данный вид отталкивания носит характер наиболее упругого биомеханического взаимодействия с опорой и осуществляется в большей степени за счет перехода механической энергии из кинетической в потенциальную и обратно. Нормальная динамическая структура взаимодействия с опорой при выполнении отскока после спрыгивания с высоты 0,25 м характеризуется однопиковым возрастанием силы воздействия на опору и имеет постоянный вид. В целях унификации описания динамической структуры нами введено ее буквенное обозначение. Момент начала контакта с опорой - касание ногами - обозначен буквой "О", точка, определяющая максимальную силу воздействия на опору, - буквой "S". Окончание контакта - отрыв ног от опоры - буквой "G". Таким образом, 1-я фаза - отрезок тензодинамограммы ОS - характеризует статоуступающий (амортизационный) режим работы структурных компонентов стопы и голеностопного сустава, накопление энергии упругой деформации и сближение ОЦМТ с опорой. Временной интервал О-S определяется длительностью протекания рассмотренных процессов. Величина зубца - точка S - дает информацию о максимальной силе взаимодействия и возможности рекуперации энергии в упругих структурах мышц. Форма кривой ОS характеризует динамику прохождения процесса накопления энергии в структурных компонентах мышц и анатомо-биомеханические и физические особенности ОДА (в основном упруго-жесткостные характеристики мышечных структур стопы и голеностопного сустава) испытуемого. 2-я фаза - отрезок SG - характеризует статопреодолевающий режим работы ОДА, удаление ОЦМТ от опоры и переход энергии упругой деформации в кинетическую энергию движения. Временной интервал S-G определяет длительность фазы собственно отталкивания, форма кривой - протекание процессов перехода энергии из потенциальной в кинетическую и скоростно-силовые возможности испытуемого. Анализ процесса взаимодействия с опорой после спрыгивания с высоты 0,25 м позволил сделать следующие заключения: 1. Двигательный аппарат в момент взаимодействия с опорой работает в двух последовательных режимах: статоуступающем и статопреодолевающем. 2. Динамическая структура характеризуется однопиковым повышением силы воздействия на опору (зубец S) и может быть описана буквенным комплексом OSG. 3. Изменение формы и величина зубца S при его типичности для данного варианта отталкивания носит индивидуальный характер, зависит от анатомо-биомеханических и физических особенностей ОДА стопы и голеностопного сустава, а также уровня развития скоростно-силовых возможностей испытуемого. 4. Процесс отталкивания осуществляется за счет работы структурных компонентов мышц стопы и голеностопного сустава (в большей степени их упругих структур), которые полностью гасят ударный импульс и осуществляют отталкивание. 5. Контрактильный механизм мышц нижних конечностей во время отталкивания работает в квазиизометрическом режиме. 6. Двигательное действие осуществляется в большей степени за счет "неметаболической" энергии.
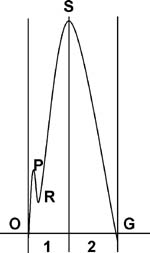
Рис. 2. Типичная тензодинамограмма взаимодей ствия с опорой при выполнении отталкивания вверх после спрыгивания с высоты 0,5 м Анализ процесса взаимодействия с опорой при выполнении отталкивания вверх после спрыгивания с высоты 0,5 м позволил выявить следующие особенности. В характере работы двигательного аппарата также выделены две фазы (рис. 2): 1) статоуступающего режима работы; 2) стато-преодолевающего режима работы. Статоуступающая фаза характеризуется вынужденным ударно-амортизационным растяжением структурных компонентов мышц стопы, голени и подключающихся к работе мышц передней поверхности бедра, вследствие чего происходит сближение ОЦМТ с опорой. В этот момент осуществляется частичный переход механической энергии движущегося тела в потенциальную энергию упругой деформации структурных компонентов ОДА. В конце фазы кинетическая энергия уменьшается до нуля (полностью гасится ударный импульс), заканчивается амортизационное сближение ОЦМТ с опорой, а потенциальная энергия упругой деформации мышечных структур нижних конечностей имеет максимальное значение. В фазе статопреодолевающего режима работы происходит обратный процесс - переход накопленной потенциальной энергии упругой деформации мышечных структур в кинетическую энергию движения ОЦМТ, величина которой не достигает своего значения до начала взаимодействия с опорой [11]. На протяжении 2-й фазы ОЦМТ удаляется от опоры со скоростью, зависящей от мощности процесса отталкивания. Отталкивание носит характер менее упругого взаимодействия ударного характера, процесс осуществляется в большей степени за счет энергии, накопленной при деформации структурных компонентов мышц ног. Анализ динамической структуры взаимодействия с опорой позволил выделить два характерных пика нарастания силы воздействия - зубцы Р и S (см. рис. 2). Начальное повышение силы воздействия на опору (участок ОР) характеризуется статоуступающим, амортизационным, режимом работы структурных компонентов мышц стопы и голеностопного сустава, первыми вступающих в процесс погашения ударного импульса. При достижении определенной величины силы воздействия на опору (величина зубца Р) происходит ее резкое снижение - отрезок РR. Поиск причин, вызывающих снижение силы, выявил следующий механизм работы ОДА нижних конечностей. Большая величина ударного импульса вынуждает двигательный аппарат ног работать в такой последовательности: во время амортизации контрактильный механизм мышц стопы и голеностопного сустава работает в режиме, близком к изометрическому, упругие компоненты предельно деформируются, гася при этом только часть ударного импульса. Двусуставные мышцы голеностопного сустава сгибают коленный сустав, выводя его из "мертвой зоны" [18] с целью предотвращения удара в колено и подключения к амортизационной работе более крупных мышц передней поверхности бедра (рис. 3).
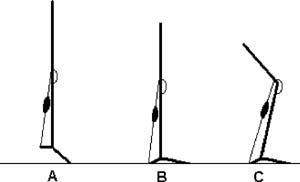
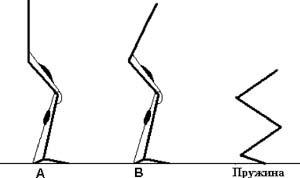
Рис. 3. Механизм работы двусуставных мышц голеностопного сустава в амортизационном режиме при непроизвольном сгибании колена: А - постановка ног на опору. В - максимальная деформация соответствует вершине зубца Р. С - уменьшение упругой деформации мышц голеностопного сустава, связанное с вынужденным, непроизвольным сгибанием коленного сустава, соответствует резкому снижению силы воздействия на опору (участок РR) и подключение к амортизационной работе мышц бедра (участок RS) В момент сгибания коленного сустава происходит резкое ослабление (укорочение) упругих элементов икроножной мышцы и вся нагрузка ложится на камбаловидную мышцу, что является одной из причин резкого снижения силы воздействия на опору. В исследовательской практике подобный способ встречается в методе "controlled release", применяемом с целью определения механических характеристик изолированных мышц [6, 8, 24, 25]. Выявленный механизм работы структурных компонентов ОДА нижних конечностей подтверждается их анатомическим строением. Большинство мышц, принимающих участие в сгибании стопы, имеют перистое строение и являются дву- или многосуставными, которые по своей морфологии характеризуются длинными сухожилиями, обладают значительными прослойками труднорастяжимой ткани и могут производить большую работу статического характера. С анатомическим строением коленного сустава связано и появление "мертвой зоны". Дистальная головка бедренной кости имеет характерную разницу радиуса кривизны, по этой причине сгибание коленного сустава до угла 167-169 градусов приводит к подъему ОЦМТ на 8-9 мм. Данная особенность наиболее ярко выражена у парнокопытных животных и имеет название "коленного замка" [3]. Сгибание коленного сустава до указанного угла не приводит к напряжению мышц передней поверхности бедра, что служит еще одной причиной снижения силы воздействия на опору. До момента выведения коленного сустава из "мертвой зоны" напряжение мышц передней поверхности бедра не соответствует требуемому уровню, что не позволяет создавать необходимую жесткость в системе - передавать давление ОЦМТ на опору, что и является главной причиной снижения силы взаимодействия. Момент возникновения жесткого сочленения в коленном суставе - подключение мышц бедра к амортизационной работе - является началом повышения силы взаимодействия с опорой до максимального значения (участок RS). Следовательно, анатомическое строение и механизм работы мышц стопы и голеностопного сустава, направленный на вынужденное, непроизвольное сгибание коленного сустава, преследуют цель предохранения опорного аппарата от ударных воздействий (удара в колено) и подключения к амортизационной работе (погашения ударного импульса) следующих более крупных структурных компонентов ОДА нижних конечностей - мышц передней поверхности бедра. В рассматриваемом варианте отрезок тензодинамограммы RS связан с работой мышц передней поверхности бедра в амортизационном режиме. Окончание амортизационного сближения ОЦМТ с опорой характеризуется полным погашением ударного импульса и максимальной силой воздействия на опору (точка S). С этого момента начинается процесс движения ОЦМТ вверх, что приводит к уменьшению силы воздействия на опору (отрезок SG). Анатомическое строение ОДА нижних конечностей и выявленный механизм его работы связаны, по нашему мнению, с эволюционным развитием человека и имеют целью предохранение опорного аппарата от ударных воздействий и минимизацию энерготрат при выполнении локомоторных движений. Полученные данные позволяют сделать вывод, что отталкивание вверх после спрыгивания с высоты 0,5 м характеризуется как ударное квазиупругое взаимодействие, которому присущи следующие особенности: 1. Двигательный аппарат при взаимодействии с опорой в момент отталкивания работает в двух последовательных режимах: статоуступающем и стато-преодолевающем. 2. К погашению ударного импульса подключаются более крупные мышцы передней поверхности бедра. 3. Наличие большого ударного импульса приводит к непроизвольному, вынужденному включению защитного механизма - сгибанию коленного сустава, на тензодинамограмме обозначенному буквенным комплексом PRS. 4. Динамическая структура взаимодействия с опорой характеризуется двухпиковым повышением силы воздействия на опору (зубцы Р, S) и может быть описана буквенным комплексом OPRSG. 5. Величина зубцов Р и S, временные интервалы: О-Р, P-R, R-S и S-G при их типичности носят индивидуальный характер и зависят от анатомо-биомеханических и физических характеристик, а также уровня развития у испытуемых скоростно-силовых способностей мышц нижних конечностей. 6. Процесс отталкивания в большей степени осуществляется за счет "неметаболической" энергии, накопленной в упругих компонентах мышечных структур.
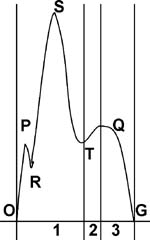
Рис. 4. Типичная тензодинамограмма взаимодей ствия с опорой при выполнении отталкивания вверх после спрыгивания с высоты 1 м Исследование процесса взаимодействия с опорой при выполнении отталкивания вверх после спрыгивания с высоты 1 м выявило следующие особенности. В режиме работы двигательного аппарата выделены три фазы: 1) статоуступающего режима работы; 2) статического режима работы; 3) сократительно-преодолевающего режима работы (рис. 4). Динамическая структура взаимодействия с опорой в рассматриваемом варианте отталкивания носит более сложный характер (см. рис. 4). Комплекс OPRS имеет аналогичную природу появления, что и при отталкивании после спрыгивания с высоты 0,5 м.
Рис. 5. Механизм работы двусуставных мышц передней поверхности бедра в амортизационном режиме: А - максимальная величина упругой деформации соответствует максимальной силе воздействия на опору (точка S на рис. 4); В - уменьшение упругой деформации мышц передней поверхности бедра, связанное со сгибанием в тазобедренном суставе, соответствует снижению силы воздействия на опору (участок ST на рис. 4) Максимальная сила воздействия на опору, зубец S, ввиду большей предварительной величины кинетической энергии имеет более высокие показатели. Снижение силы с максимальной величины - отрезок ST - связано с тем, что амортизационный режим работы структурных компонентов двигательного аппарата стопы, голени и бедра не смог полностью погасить ударный импульс. И по аналогии с мышцами голеностопного сустава двусуставные мышцы передней поверхности бедра сгибают тазобедренный сустав, тем самым предохраняя его и позвоночный столб от удара и подключая к амортизационной работе еще более крупные мышцы задней поверхности бедра и тазобедренного сустава (рис. 5). Необходимо отметить, что установленный механизм работы ОДА нижних конечностей в амортизационном режиме напоминает принцип работы пружины (см. рис. 5), который в соответствии с законами теоретической механики является наиболее эффективным вариантом погашения вибрационных и ударных нагрузок, а при обладании определенными физическими свойствами - средством эффективного накопления энергии [4, 5, 9, 12, 13]. Максимальная величина воздействия на опору (зубец S) соответствует максимальному значению энергии упругой деформации структурных компонентов ОДА нижних конечностей. Сгибание в тазобедренном суставе уменьшает упругую деформацию структурных компонентов и снижает возможность использования "неметаболической" энергии в процессе отталкивания. Это связано с анатомическим строением ОДА нижних конечностей. При сгибании в тазобедренном суставе мышцы задней поверхности бедра не могут накапливать энергию упругой деформации при согнутом коленном суставе. Вся нагрузка ложится на большую ягодичную мышцу, которая по своему анатомическому строению не предрасположена к накапливанию энергии упругой деформации (большая, мощная контрактильная часть и очень маленькая фасция): работает в уступающем режиме и рассеивает (демпфирует) механическую энергию [21]. В момент начала работы мышцы в изометрическом режиме сгибание в тазобедренном суставе прекращается и импульс силы движущегося туловища через жесткие сочленения в суставах передается на опору, вызывая повышение силы воздействия, характерное для фазы статического режима работы (участок ТQ). При условии превышения скоростно -силового потенциала сократительного механизма мышц испытуемого (уровня силового воздействия на опору в фазе статического режима работы) возможно увеличение давления на опору в фазе преодолевающего режима работы (увеличение зубца Q) за счет собственного сокращения мышц. Если при статической работе сила воздействия на опору была относительно высокой, то механизм преодолевающего режима осуществляется в большей степени за счет энергии упругой деформации [23]. Таким образом, изучение процесса взаимодействия с опорой при выполнении отталкивания вверх после спрыгивания с высоты 1 м выявило следующее: 1. Работа ОДА характеризуется тремя последовательными режимами: уступающим, статическим и преодолевающим. 2. К погашению ударного импульса подключаются более крупные мышцы задней поверхности бедра и тазобедренного сустава. 3. Наличие ударного импульса опасной величины приводит к непроизвольному, вынужденному включению защитного механизма - сгибанию коленного и тазобедренного суставов, на тензодинамограмме соответственно обозначенных буквенными комплексами PRS и STQ. 3. В динамической структуре взаимодействия с опорой выделены три характерных зубца повышения силы (P, S, Q). 4. Весь процесс взаимодействия с опорой может быть описан буквенным комплексом OPRSTQG. 5. Величина зубцов Р, S и Q, временные интервалы: О-Р, P-R, R-S, S-T, T-Q и Q-G при их типичности носят индивидуальный характер и зависят от анатомо-биомеханических и физических свойств ОДА, уровня развития у испытуемых скоростно-силовых способностей мышц нижних конечностей и организации двигательного действия. 6. Отталкивание носит наименее упругий характер и осуществляется за счет подключения "метаболической" энергии для осуществления двигательного действия. В соревновательных вариантах рассматриваемого вида отталкивания сохраняются вышеизложенный механизм работы двигательного аппарата и динамическая структура взаимодействия с опорой. Например, при отталкивании в акробатических прыжках после выполнения элементов рондат или фляк (движение спиной вперед) отмечены те же особенности работы ОДА и динамической структуры взаимодействия с опорой (комплекс OPRSG), что и в отталкивании после спрыгивания с высоты 0,5 м (см. рис. 2). Данный механизм работы ОДА и динамическая структура остаются неизменными даже при значительной величине предварительной кинетической энергии. Объясняется это тем, что в момент отталкивания за счет активного движения туловища вверх-назад происходит выпрямление в тазобедренных суставах, что увеличивает упругую деформацию мышц передней поверхности бедра и значительно повышает эффективность (упругость) отталкивания. Данная техника отталкивания исключает появление комплекса STQ, который приводит к уменьшению упругости отталкивания. Подобный механизм работы ОДА встречается и в прыжках в высоту способом "фосбери-флоп". Об эффективности данного варианта взаимодействия с опорой свидетельствуют факты из спортивной практики: наиболее сложные и высокие акробатические прыжки (даже в абсолютном значении) выполняются при поступательном движении спиной вперед. Данный вариант отталкивания в последнее время стал применяться и в опорных прыжках в гимнастике. Все существующие в настоящее время рекорды в прыжках в высоту установлены способом "фосбери-флоп". Для отталкиваний, выполняемых при движении лицом вперед, характерны работа двигательного аппарата и динамическая структура взаимодействия с опорой, описываемые буквенным комплексом OPRSTQG (см. рис. 4). Данному варианту отталкивания, даже при небольших величинах предварительной кинетической энергии (небольших динамических нагрузках в фазе уступающего режима работы), присущ комплекс STQ. Снижение усилия (ST) происходит вследствие сгибания в тазобедренном суставе, вызванного инерционным движением туловища вперед в момент стопорящей постановки ног (ноги) на опору и совокупной работой двусуставных мышц передней поверхности бедра. Рассматриваемый механизм наиболее ярко проявляется при отталкивании в легкоатлетических прыжках в длину, только в динамической структуре взаимодействия с опорой отсутствует комплекс РR вследствие постановки ноги на всю стопу или даже на пятку (тройной прыжок), что приводит к нарушению механизма работы ОДА в эффективном амортизационном режиме (уменьшению энергии упругой деформации структурных компонентов) и травмированию коленного сустава [1, 2, 21]. Необходимо отметить, что спринтеры, имеющие наиболее высокие результаты, при беге по дистанции отклоняют тело назад, добиваясь тем самым повышения эффективности взаимодействия с опорой (наиболее ярко эта техника проявляется у американского бегуна Майкла Джонсона, 400 м). Заключение . В исследовании выявлено, что режим работы двигательного аппарата при ударных видах отталкивания, механизм энергообеспечения двигательного действия и динамическая структура взаимодействия с опорой зависят от величины предварительной кинетической энергии и организации двигательного действия в процессе отталкивания. Динамическая структура взаимодействия с опорой типична для каждого варианта ударного вида отталкивания, а ее параметры зависят от целевой установки двигательного действия, организации работы ОДА, анатомо-биомеханических и физических характеристик структурных компонентов двигательного аппарата, а также уровня развития у испытуемых скоростно-силовых способностей. По причине идентичности динамической структуры взаимодействия с опорой и ее типичности для каждого варианта ударного вида отталкивания можно ввести их буквенную унификацию. Самый упругий и эффективный вариант взаимодействия с опорой осуществляется без подключения к выполнению двигательного действия (отталкиванию) мышц бедра и может быть охарактеризован буквенным комплексом OSG. Вариант отталкивания, осуществляемый с участием мышц передней поверхности бедра, характеризуется буквенным комплексом OPRSG. Наименее упругий вариант отталкивания, при выполнении которого задействованы мышцы задней поверхности бедра и тазобедренного сустава, может быть описан буквенным комплексом OPRSTQG. Использование унифицированных обозначений (буквенных комплексов), как доказали научная теория и практика [7, 17], намного упрощает и совершенствует процесс тестирования испытуемых, предоставляет возможность подробно охарактеризовать динамическую структуру двигательного действия, дать ему оценку - провести диагностику. Литература 1. Башкиров В.Ф., Грачев М.Н. Травматизм и заболеваемость ОДА у легкоатлетов //Теор. и практ. физ. культ. 1983, № 2, с. 47 - 49. 2. Башкиров В.Ф. Профилактика травм у спортсменов. - М.: ФиС, 1987. - 176 с. 3. Березкин А.Г. Локомоции животных и биомеханика опорно-двигательного аппарата //Матер. I Всесоюз. семинара. - Киев: Наукова думка, 1979, с. 46 - 52. 4. Бранков Г. Основы биомеханики. - М.: Мир, 1981, с. 82 - 94. 5. Бутенин Н.В., Лунц Я.А., Меркин Д.Р. Курс теоретической механики. Т. 2 - М.: Наука, 1985. - 496 с. 6. Губанов Н.И., Утенбергенов А.А. Медицинская биофизика. - М.: Медицина, 1978. - 333 с. 7. Дехтярь Г.Я. Электрокардиографическая диагностика. - М.: Медицина, 1966, с. 58 - 67. 8. Зациорский В.М., Аруин А.С. Биомеханические свойства скелетных мышц (обзор, методы и результаты исследований) //Теор. и практ. физ. культ. 1978, № 9, с. 21 - 35. 9. Зациорский В.М., Аруин А.С., Селуянов В.Н. Биомеханика двигательного аппарата человека. - М.: ФиС, 1981. - 95 с. 10. Иванова Г.П., Курысь В.Н. Определение кинематического момента, возникающего при взаимодействии тела с опорой // Теор. и практ. физ. культ. 1973, № 1, с. 71 - 73. 11. Кеплен С., Эссиг Э. Биоэнергетика и линейная термодинамика необратимых процессов. - М.: Мир, 1986, с. 266 - 309. 12. Мэрион Дж.Б. Общая физика с биологическими примерами. - М.: Высшая школа, 1986. - 620 с. 13. Никитин Л.В. Модель биоупругого тела. // Изв. АН СССР, МТТ. 1971, № 3, с. 154. 14. Попов Г.И. О передаче мышцей энергии при заданном волновом движении звеньев тела //Биофизика. 1990, т. 35, вып. 4, с. 670 - 674. 15. Попов Г.И. Биомеханические основы создания предметной среды и совершенствования спортивных движений: Докт. дис. - М., 1992. - 624 с. 16. Попов Г.И. Синергетика биомеханических систем //Сб. науч. тр. - М.: ВНИИФК, 1993, с. 315 - 323. 17. Степин В.С., Горохов В.Г., Розов М.А. Философия науки и техники. - М.: Контакт - Альфа, 1995, с. 182 - 212. 18. Тюпа В., Чистяков В., Алешинский С. Биомеханика отталкивания // Легк. атл. 1981, № 9, с. 10 - 12. 19. Хейн В.Э., Вайн А.А. Роль биомеханических свойств мышц в механизме отталкивания при исполнении сальто // Теор. и практ. физ. культ. 1983, № 4, с. 11 - 13. 20. Хилл А. Механика мышечного сокращения. - М.: Мир, 1972. - 110 с. 21. Шойлев Д. Спортивная травматология. - София: Медицина и физкултура, 1986. - 191 с. 22. Шмид Р. Физиология человека. Т. 1. - М.: Мир, 1985, с. 50 - 76. 23. Abbott B. Muscle mechanics // Biomechanics. - Its Foundations and Objectives. - New Jersey., Prentice Hall, 1972. - P. 209-215. 24. Bonn K., Hof A., Wallinda-Dejone W. The mechanical behaviors of the passive arm. Biomechanics 3-rd. International Seminar Rome, Kargen edit., 1971. - P. 246-251. 25. Casser H., Hill A. The dynamik of muscular contraction. Proc. Roy. Soc. Biomechanics., 1924. - P. 398-437. 26. Elftman H. Biomechanics of muscular organs // Journal of Biomechanics. - 1987. Vol. 10. - P. 5-12. 27. Hill A. The series elastic component of muscle // Proc. Roy. Soc. Biomechanics., 1950, 137. - P. 273-280. При любом использовании данного материала ссылка на журнал обязательна! |